


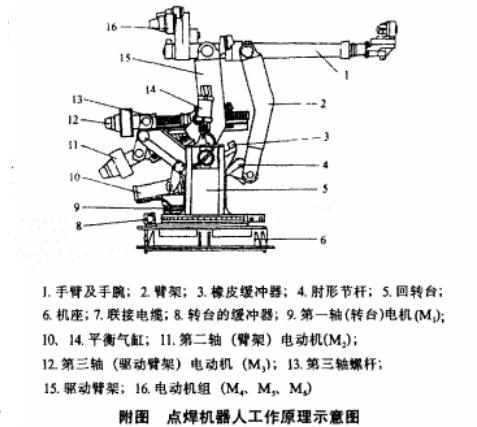
附图所示为点焊机器人示意图,该机器人运动轴为六轴关节式,电动机M1驱动回转台旋转,实现第-轴的运动; 电动机M2推动臂架2的摆动,实现第二轴的运动;电动机M3带动驱动臂架12的摆动,实现第三轴的运动;电动机组M4、M5、 M6通过实轴或空心轴,实现驱动手腕的动作。为了保证结构在运动过程中保持尽可能无间院和一定的刚性,避免大的惯性扭矩,并一直保持高速,直至传递到工作端才进行减速,**轴采用了摆线针轮减速器,第二轴、第三轴使用了滚珠丝杠,手腕部件的各驱动轴均采用了谐波齿轮碱速器。此外, 为了抵消惯性力影响,在第二轴、第三轴上设置了平衡汽缸。
在确定了点焊机器人机械结构的几何模型后,就可以进行其机构运动的仿真分析,既能比较真实地模拟机器人所完成的点焊操作的运动过程,又可进行点焊动作的运动分析和确定合理的运动范围。为使焊点轨迹不发生偏离,以实现正确焊接,在进行点焊操作作业时,机器人首先是进行平移的动作,完成焊枪和焊点间的位置修正;然后进行焊枪和焊点间的角度误差修正,实现点焊过程的规范操作,此类机器人回转机械臂类似于人的手臂,在水平方向具有顺应性,可吸收点焊操作中的平移误差和角度误差;而在垂直方向具有较大的刚性,便于点焊操作,如果在手部施加水平方向的作用力,会使机械臂作微小的转动,进行微调点焊操作,从而实现自动纠正并减小位置与角度误差,使点焊操作能顺利地完成。
上述用于点焊操作的机器人主要技术指标是:①重复定位精度达+0.30mm;②自由度数为6个;3各轴运动速度为80 °~ 120。/sec或1.25~1.45 m/sec;④柔性手臂转角范围为+90°。通过选用不同型号的控制器,可用于点焊和连续轨迹焊接作业;调配手腕部所夹持的相应工具,也可进行加工、装配等其他多种操作.
点焊机器人的应用
点焊机器人在机械制造中的应用大多数的焊接机器人其实就是通用的工业机器人装上某种焊接工具而构成的。在多任务环境中,一台机器人甚至可以完成包括焊接在内的抓物、搬运、安装、焊接和卸料等多种任务,机器人完全可以根据程序设定和任务性质,自动更换机器人手腕上的工具,完成相应的工作任务。在机械制造领域中,用于焊接加工的机器人占据了整个工业机器人应用中的半壁江山。这些焊接机器人中有的是为某种焊接方式专门设计的。
